Case Studies
How 3D Imaging Tools Are Expanding The Dimensions of Finnish Machine Vision Market
OEM Finland Oy leverages Matrox Design Assistant X software to build customized reference application for 3D vision
The past few years have seen growing demand for 3D imaging capabilities in the machine vision industry. Largely tied to increased use and applications within automation, 3D has matured from cool sci-fi trick to full-fledged reconstruction technique that captures the shape and appearance of real objects in three dimensions.
New technology offers tremendous utility, provided customers are equipped to use the tools available to them. “One of the major challenges that prevent many customers—especially smaller or less software-development-focused customers—from using 3D technology is the lack of easy-to-use integrated development environments (IDEs) for programming imaging software,” says Kimmo Jansson, who oversees technical support for machine vision at OEM Finland Oy. “With the launch of Matrox Design Assistant X and its support for third-party 3D sensors and depth-maps, we immediately saw great potential in enabling more companies to utilize 3D imaging technology.”
Measuring market needs
Part of the international OEM Group, one of the largest vendors of industrial components in northern Europe, OEM Finland Oy provides an exceptionally broad range of industrial automation and electromechanical components for machine builders and the manufacturing industry.
With rising demand for 3D imaging tools in the Finnish market, OEM Finland was willing to find a solution that would help their customers understand how and when to use 3D imaging tools. Jansson saw a keen opportunity to develop a reference application for 3D image acquisition, which could be provided to customers as a sample project and a starting point to assist with their own project development. They selected Matrox Design Assistant X vision software because its flowchart-based integrated development environment (IDE) is readily accessible to anyone with basic knowledge of imaging. This allows virtually any developer to successfully build an application that uses supported third-party 3D sensors. The IDE also enables users to design a graphical web-based operator interface.
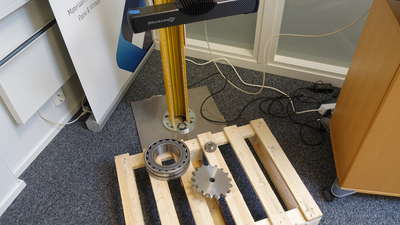
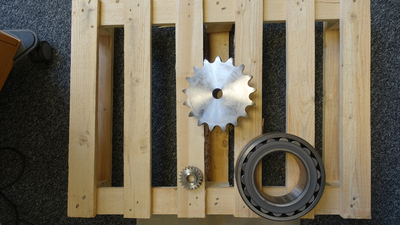
The reference application used stainless-steel cogwheels of various sizes and heights as the objects to be located. Set at different angles and heights, the objects were surveyed by the 3D scanner, and their location determined by the depth map data analyzed by Matrox Imaging software.
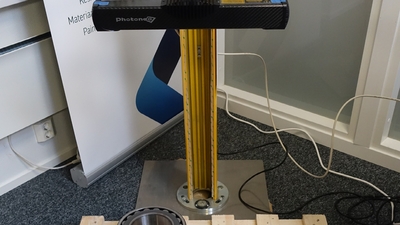
In consultation with business area manager of OEM’s machine vision products, Miikka Himanka, Jansson undertook a special project for OEM Finland Oy, building a reference application that highlights 3D imaging capabilities, as well as writing a thesis1. Their intention was to provide a comprehensive example and overview of the subject that familiarizes users with basic concepts of 2D and 3D imaging, as well as the steps of designing, building, and testing the reference application. The reference application focuses on object recognition and positioning using a 3D imaging device. The objects in question were stainless-steel cogwheels of various sizes and heights; these were set on a pallet, where some were level and some had a certain degree of tilt. A 3D scanner2 surveyed the entire pallet; objects were located using Geometric Model Finder on the acquired depth-map, which enables the use of powerful 2D tools on a 3D scene. Functions of this application include object model recognition, detecting the topmost object among several objects, and determining the position and angle of the topmost object.
Matrox Imaging arranged to provide Jansson with access to an advance copy of Matrox Design Assistant X software to facilitate this project. “Once we had the software, we were able to get this project built entirely through self-directed learning using Matrox Vision Academy training videos, the well-organized software documentation, and the template examples provided within the software itself,” Himanka notes.
X, Y, and Z: Bringing it all together
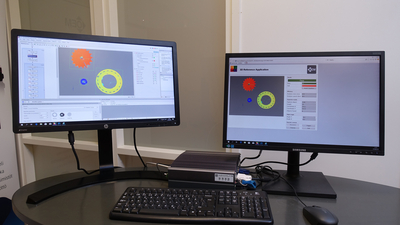
Within the reference application, Matrox Design Assistant X’s Model Finder tool first identifies objects and counts the number of occurrences. Intensity Checker determines which of these objects is the highest, and calculates the angle of tilt for the X- and Y-axes of the highest object; this is done by finding two points on each axis and trigonometrically calculating the angle between those points. After a successful cycle, the location and angle information of the highest object will be passed and the cogwheel is removed from the pallet for a new image to be acquired and analyzed. Operator interaction with the system is minimal; once the operator interface has been set up, the operator need only begin a free-run or triggered acquisition. Acquired images and result data are shown on the interface.
OEM Finland Oy’s aim in developing this reference application is to simulate the gathering of positioning information for an industrial robot. As such, no communication links to other devices have been established, as these would be unique to each customer’s design and development needs. For the purpose of this reference application, position results are written to a log file on the disk.
3D technology has enormous potential for the automation sector, and many 3D camera and sensor manufacturers offer proprietary application programming interfaces (APIs) and/or software development kits (SDKs) in order to use these devices. “For companies whose main focus is not software development, the complexity and learning curve for using these proprietary tools is simply too much,” Jansson affirms. “For that reason, I believe 3D technology has not been widely adopted in the field yet despite the huge amount of interest it has received. Until recently, customers needed to possess considerable expertise in software development, typically in C++ or some other such language, to be able to utilize a 3D sensor. The release of Matrox Design Assistant X changes everything.” Matrox Design Assistant X dramatically simplifies the 3D acquisition process, removing a major obstacle impeding wide-spread utilization of 3D technology, and providing an interface to a range of third-party 3D sensors.
Conclusion
The software—and the reference application OEM Finland Oy developed—analyses the depth maps produced by 3D sensors, while also providing data to fill gaps in a depth map, remapping a depth map for optimal use including visualization, and presenting the depth data in the world units given by the 3D sensor. “Based on our own experiences as well as feedback from our customers,” Jansson affirms, “Matrox Design Assistant X is quite possibly the most easy-to-use development environment for creating advanced vision applications. It allows virtually any customer to develop their own vision system quickly and efficiently. With our reference application and thorough written documentation, we want to make it even easier for our customers to adopt 3D in their operations.”
1. Jansson, K. (2019). 3D-referenssisovellus: Kappaleen tunnistus ja paikoitus Matrox Design Assistant X –kehitysympäristössä [3D Reference Application: Object Detection and Positioning in Matrox Design Assistant X Development Environment] (Bachelor’s thesis). Häme University of Applied Sciences, Hämeenlinna, Finland.
2. A Photoneo PhoXi M 3D scanner was used for development of this reference application; a complete list of supported 3D sensors and cameras can be found at Matrox Imaging.
For more information contact Media Relations.